고정 헤더 영역
상세 컨텐츠
본문
728x90
전류 제어기를 설계했으니 이제 속도 제어기를 설계해보자.
DQ변환 때메 골머리를 먹었는데 어느정도 해결이 되어 글을 다시 써본다.
속도 제어기 설계는 (2) 장부터 보길 바란다.
이번 시간에는 시뮬레이션을 위해 중요한 단위 변환을 중점으로 소개하고자 한다.
속도 제어기를 설계하기 전에 모터 파라미터를 짚고 넘어가자.
내가 설계한 제어기는 DQ 변환 중 "상크기 불변" 방식을 사용하기 때문이다.
DQ 변환은 "전력 불변"과 "상크기 불변" 방식이 있다.
"전기기기 제어론(설승기 저)"이나 "모터제어(김상훈 저)"를 보더라도, "상크기 불변" 방식을 사용하여 수식을 표현하고 있다.
Simulink는 "상크기 불변"방식을 사용하므로 각 신호의 스케일을 조정해줘야 한다.
(이 과정에서 조금 화가 난다.)
먼저 Simulink로 설계한 제어기를 소개한다.
아직 약자속 제어나 외란 관측기를 설명하지 않았지만 먼저 설계해보았다.

제어기를 설계할 때 주의해야 하는 사항은 다음과 같다.
1. 속도 제어기의 출력은 토크[Nm]이므로, 전류 제어기에는 단위 변환을 해줘야 한다.
전류제어기로 표기 되어 있어서 곧바로 입력하면 게인값의 스케일 조정이 필요하게 될 것이다.
2. DQ 변환으로 인한 크기 조정을 해야 한다.
Simulink에서 사용하는 DQ 변환 방식을 사용할 경우, 실제 UVW상 전압, 전류 값을 보기 위해 √(2/3)를 곱해서 스코프로 계측해야 한다.
아래 글의 맨 아래에 정리된 수식을 참고한다.
DQ 변환 - 수식 설명
DQ 변환에 대한 그림 설명을 먼저 보고 오면 이해하는데 도움이 될 것이다. 큰 틀에서 이해를 한 상태에서 수식을 이해하는 것이 좋다. 수식은 나중에 찾아보면 되는 것이니까 전체적인 흐름을
zin9.tistory.com
3. DQ 변환을 고려하여 모터 파라미터를 조정한다.
이 과정은 밑에서 소개한다.
자, 시뮬레이션에 사용할 모터 파라미터를 소개한다.
모터 파라미터의 경우, 극수, 역기전력 정수, 저항과 인덕턴스 등은 제조사를 통해 얻어야 하는 불편함이 있다.
(역기전력 정수는 토크 정수를 통해 얻을 수 있기도 하다.)

이 모터 파라미터를 사용하는 NT 곡선은 다음과 같다.
회색 영역은 연속 사용 가능한 영역이다.
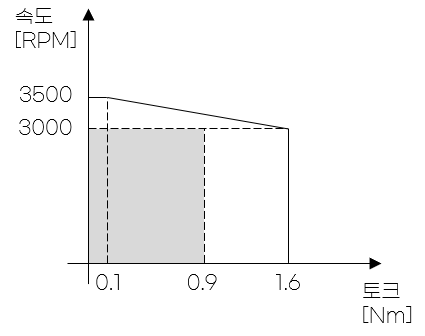
표 1의 데이터를 시뮬레이션에 사용할 수 있게 변환하는 작업이 필요하다.
왜냐? 토크 방정식에 필요한 값을 얻어야 하기 때문이다.
토크 방정식을 다시 떠올려보자.

식 (1)을 보면, 토크는 극수와 자속에 비례한다.
자속은 모터 파라미터에 없기 때문에 표 1을 기반으로 구해줘야 한다.

식 (2)를 보면, 자속은 토크정수에 비례하고, 극수에 반비례한다.
그런데, 중간에 곱해져있는 값은 무엇일까?
첫번재 괄호 안에 있는 비례상수는 단위 변환을 위한 것이다.
식(1)을 보면 자속은 순시치인 DQ 전류와 곱해진다.
1. 토크정수의 비례상수
그런데 토크정수를 보면 [Nm/Arms] 단위로 표시된다.
이 단위는 무엇인지 살펴보려면 모터의 결선 방식을 먼저 알아야 한다.
상용모터 대부분은 그림 2와 같은 Y결선으로 이루어진다.
그렇기 때문에 4개의 선이 나온다.
중성선 n은 보통 FG(Frame Ground)에 연결한다.

어떤 제조사의 경우 그림 3과 같이 Δ결선 방식을 사용하기도 한다.
이 경우 전류 센싱은 모터의 상전류가 아닌 선전류이므로, 계산에 유의해야 한다.
흔히 사용하는 방식은 아닌 것으로 보이며, 제 3 고조파의 영향을 줄이기 위함이 아닐까싶다.
(모터 토크에는 다양한 주파수 성분이 있고, 제 3고조파가 가장 영향이 크게 발생하는데, 이를 줄이기 위해 Δ결선 방식을 사용한다.)

2. DQ 변환의 비례상수
토크 정수의 변환은 완료했고, 남은 비례상수인 √(2/3)는 DQ변환으로 인한 비례상수이다.
DQ변환은 2가지 방식이 있지만, "상크기 불변" 방식을 사용할 때는 DQ변환으로 인한 비례상수 처리가 중요하다.
DQ변환을 하더라도 "에너지 보존 법칙"에 의해 변환 전후의 에너지가 동일해야 하므로,
이 내용은 DQ 변환 게시글의 맨 아래 내용을 보도록 한다.
DQ 변환 - 수식 설명
DQ 변환에 대한 그림 설명을 먼저 보고 오면 이해하는데 도움이 될 것이다. 큰 틀에서 이해를 한 상태에서 수식을 이해하는 것이 좋다. 수식은 나중에 찾아보면 되는 것이니까 전체적인 흐름을
zin9.tistory.com
이로써 다음의 Matlab Script 파일처럼 시뮬레이션에 사용할 파라미터를 정리할 수 있다.

이 때, 역기전력정수[Vrms/(rad/s)]는 토크정수를 3으로 나눈 값과 같다.
728x90
'제어기설계' 카테고리의 다른 글
| 속도 제어기 설계 (3) - PI 게인 조정 (4) | 2023.01.08 |
|---|---|
| 속도 제어기 설계 (2) - 설계 이론 (2) | 2023.01.08 |
| 수식 및 단위 정리 (0) | 2022.12.31 |
| 전류제어기 설계 (2) (0) | 2022.12.22 |
| 전류제어기 설계 (1) (2) | 2022.12.21 |




