고정 헤더 영역
상세 컨텐츠
본문
728x90
전류제어기 설계 (1)
이번 시간에는 전류 제어기의 설계에 대해 알아본다. 내 주된 공부 자료는 "전기기기제어론(설승기 저)"이기 때문에 교과서의 내용을 그대로 적은 부분도 있다. 설명하면서 "대역폭", "게인값 설
zin9.tistory.com
지난 시간에 이어 전류 제어기 설계에 대해 자세히 알아보고자 한다.
소개할 내용은 다음과 같다.
1. 전류 측정
2. 안티와인드업
1. 전류 측정
전류제어기 설계에서 가장 중요한 것은 전류 측정이다.
센싱된 전류값은 가장 안 쪽의 전류 루프에 사용되기 때문에, 가능하면 센싱 주기가 빠르고 정확하게 측정되어야 전류제어기의 성능을 높일 수 있다.
전류 측정은 MCU에 내장된 "DAC(Digital-Analog Converter)" 기능을 사용하거나 "Δ-Σ IC"를 사용할 수 있다.
무엇이 되었던 간에
1) 전력변환 회로나 측정기기로부터 발생되는 "노이즈"를 최소화하거나 강인하게 만드는 것,
2) 측정에서 발생하는 시간지연을 최소화하는 것
이 두 가지가 기술적으로 어려우면서도 해결해야 할 과제이다.
전류 측정 기법에는 크게 2가지 방법이 있다.
1) DAC
2) Δ-Σ(Delta-Sigma) Converter
TI사의 TMS320F28388D의 경우 DAC, ADC 기능을 모두 지원한다.
Sigma-Delta Filter Module(SDFM) 기능이 있는데, Δ-Σ IC로 전류측정에 사용할 수 있는지 지금은 모르겠다.
MCU에 ADC기능이 없는 FPGA의 경우 Δ-Σ IC를 사용하여 전류값을 측정한다.
Δ-Σ 변환이 노이즈에 큰 내성을 가지기 때문에 정확한 측정을 한다면 이 기법을 사용하는 편이 좋다.
Δ-Σ 변환은 24bit로 나타나기 때문에 일반적으로 MCU에서 12~24bit ADC를 사용하는 것에 비해 분해능도 높고,
데이터 처리에 필요로 하는 양도 상대적으로 작아서 throughput도 작은 편이다.
어플리케이션과 목적에 따라 MCU에서 제공하는 ADC 기능을 사용할지 Δ-Σ IC를 사용할지 결정해야 한다.
전류 측정 방법은 크게 3가지로 나뉜다.
1) 저항에 의한 측정
2) 변류기(CT)에 의한 측정
3) 홀 효과를 이용한 측정
세가지 방법의 특징을 비교하면 표 1과 같다.

2. 안티 와인드업(Anti-Windup)
안티 와인드업이란 와인드업에 반하는 것이다.
그렇다면, 와인드업이란 무엇인가?
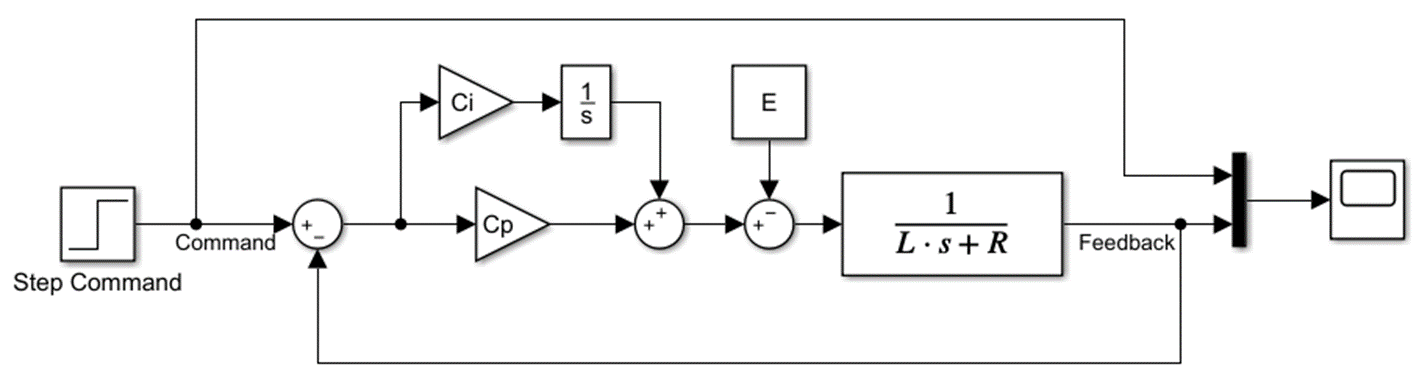
그림 1을 보자.
PI 제어기의 경우 오차(지령과 응답의 차)에 의해 제어기의 출력(전압 지령)의 값이 결정된다.
오차가 커지면 이를 보상하기 위해 전압지령이 커지게 되는데, 출력 전압은 FET(또는 IGBT)에 걸리는 DC 링크 전압에 의해 제한된다.
의도적으로 DC 링크 전압보다 낮게 제한할 수도 있을 것이다.
즉, 오차를 보상하기 위해 전압지령이 커져야 하지만, 공급 전압이 제한되있기 때문에 오차는 더욱 커지게 된다.
이러한 오차는 PI제어기에 적분항이 있기 때문에 계속해서 쌓이게 된다(적분항은 오차의 누적이기 때문에).
적분기의 적분 값은 값이 제한되지 않고 제어기의 제한폭을 넘어 쌓이게 되는데, 이러한 현상을 와인드업(Windup)이라 한다.
적분기의 와인드업 현상이 발생하게 되면, 적분기의 누적 오차가 줄어들어 정상상태로 돌아오기까지 오래 걸린다.
오차가 긴 시간동안 반대부호를 가져야만 하기 때문에, 제어기의 응답이 느려지고 심한 경우 발산할 수도 있다.
따라서, 제어기의 출력과 적분기의 출력 각각을 구동 장치의 물리적 제한에 따라 적절히 제한해주어야 하는데 이러한 기법을 안티 와인드업(Anti-Windup)이라 한다.
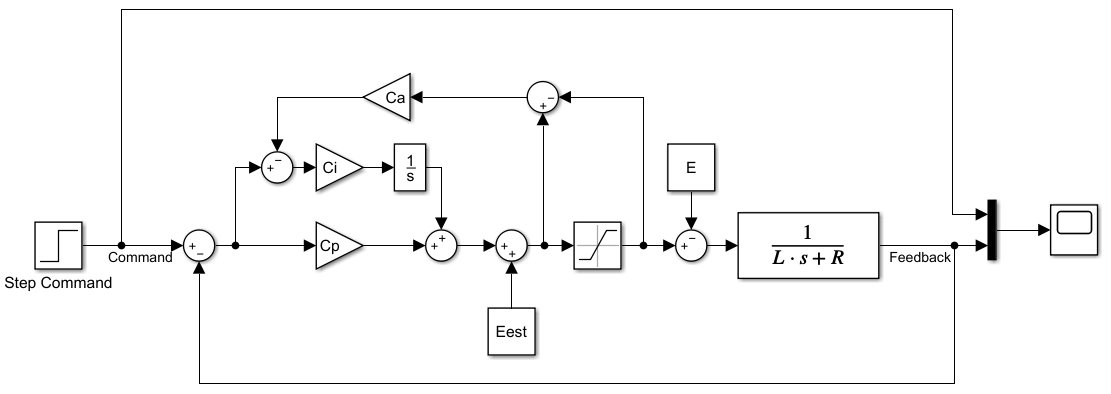
안티 와인드업의 방법은 여러가지 방법이 있으나, 그림 2와 같이 역전달 연산법(Back Propagation Calculation)이 가장 좋은 특성을 나타낸다.
안티 와인드업이 적용된 제어기와 그렇지 않은 제어기를 비교하면 그림 3과 같다.
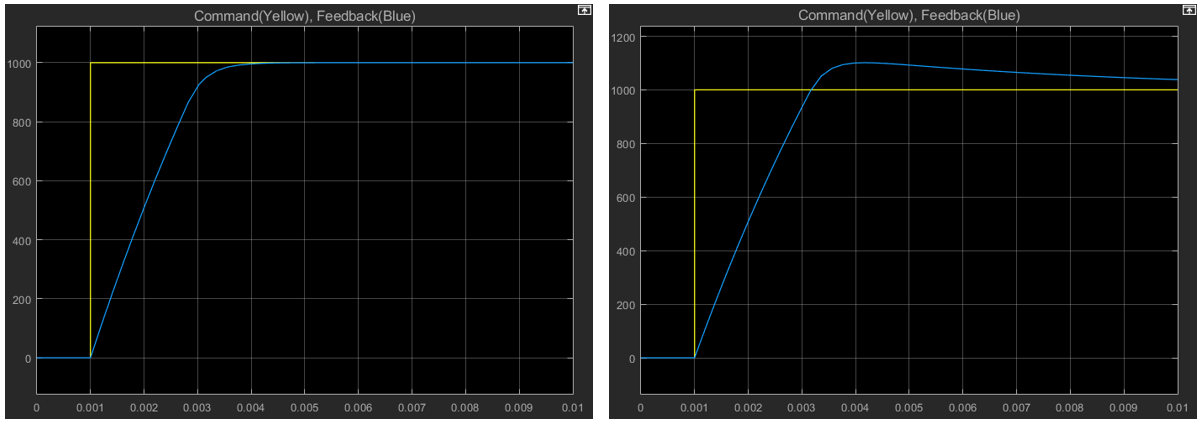
적분기의 제한기로 인해 제어기의 출력(전압 지령)이 제한된 상태에서 안티와인드업이 없는 경우, 정상상태에 도달하는데 긴 시간이 소요된다.
그림 4를 보면, 적분기의 누적 오차를 볼 수 있다.
노란색이 안티 와인드업이 적용된 적분기의 파형이고, 파란색이 안티 와인드업이 적용되지 않은 적분기의 파형이다.
안티 와인드업이 없는 경우, 상대적으로 적분기의 누적오차가 더욱 커진 것을 볼 수 있다.

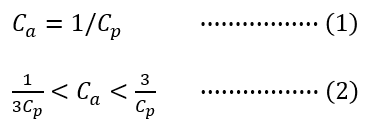
그림 2에서 안티 와인드업 제어기의 이득 Ca를 선정하는 기준은 어떻게 될까?
이득 Ca는 통상 식 1과 같이 설계하는데, 요구되는 제어 특성에 따라 식 (1)을 기준으로 하여 식 (2)의 범위에서 조정할 수 있다.
이 외에도 적분기의 와인드업을 막기 위해 미리 설정된 조건에 따라, 적분 기능을 온-오프 하는 조건부 적분 방법을 생각할 수 있다.
다만, 제어기에 적분기가 있는 이유는 정상 상태 오차를 0으로 하기 위함이므로, 적분 기능을 사용하지 않더라도 정상 상태 오차가 0이 되는 것이 보장되어야 한다.
이상 안티 와인드업에 대해 설명했다.
마지막으로 안티 와인드업에 대해 정리하면 다음과 같다.
안티 와인드업은 적분기를 포함하면서 그 출력이 물리적으로 제한되는 모든 제어기에 필수적으로 부가되어야 한다.
이상 직류 전동기의 전류 제어기 설계에 대해 알아보았다.
기본적인 개념을 익혔으니, 다음 시간엔 교류 전동기의 전류 제어기 설계에 대해 설명한다.
출처
1) "전기기기제어론(설승기 저)"
728x90
'제어기설계' 카테고리의 다른 글
| 속도 제어기 설계 (1) - 모터 파라미터 (4) | 2023.01.08 |
|---|---|
| 수식 및 단위 정리 (0) | 2022.12.31 |
| 전류제어기 설계 (1) (2) | 2022.12.21 |
| DQ 변환 - 수식 설명 (13) | 2022.12.05 |
| DQ 변환 - 그림 설명 (7) | 2022.12.04 |




