고정 헤더 영역
상세 컨텐츠
본문
728x90
외란 관측기 설계 (1) - 전차원 관측기
이번 시간에는 외란 관측기를 설계하기 위한 이론적인 접근을 할 것이다. 외란 관측기를 왜 설계하는가? 모터가 동작하는 동안에는 수많은 외란이 입력된다. 점성마찰, 쿨롱마창, 감속기 마찰,
zin9.tistory.com
외란 관측기 설계 (3) - 수식 설명
외란 관측기 설계 (1) - 전차원 관측기 이번 시간에는 외란 관측기를 설계하기 위한 이론적인 접근을 할 것이다. 외란 관측기를 왜 설계하는가? 모터가 동작하는 동안에는 수많은 외란이 입력된
zin9.tistory.com
이제 관측기를 구성하면 식(1)과 그림 1로 나타낼 수 있다.


구동토크와 측정된 위치 정보로부터 외란 토크TL와 속도ωrm을 검출하는 데 있어,
정상상태와 과도상태에서 안정된 특성을 갖는 비례 이득 행렬 L을 설정하도록 하자.
특성방정식은 식(2)로 표현할 수 있고, 설계하고자 하는 오차 특성 방정식을 식(3)이라 하자.

두 식을 동일하게 하면 식(4)~(6)와 같이 표현할 수 있다.
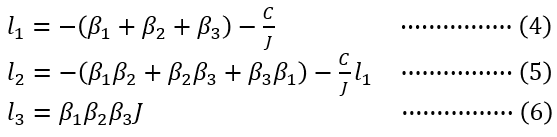
이 특성 방정식의 근을 삼중근으로 두면 다음과 같다.
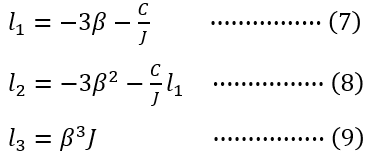
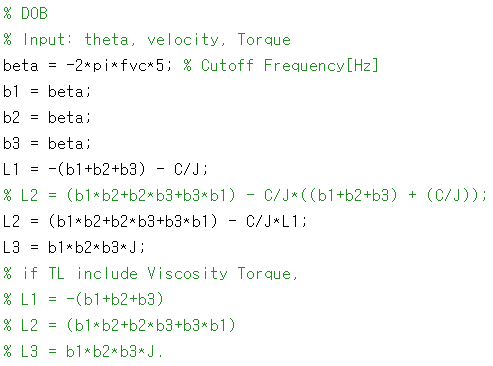
마찰에 의한 토크를 외란 토크에 포함하며 무시하는 경우는 다음과 같다.

β에 의해 결정되는 관측기의 주파수 대역폭은 속도 제어 시스템의 주파수 대역폭 보다 충분히 커야 한다.
대략 3~5배
β가 너무 작으면 추정치의 수렴 속도가 느려지고, β가 너무 크면 측정상 잡음 등으로 관측기가 불안정해질 우려가 있다.
이론은 더 많지만 설명이 길어지면 지루해지게 된다!
가장 이상적인 관측기를 보자.
실제 시스템은 제정수 오차가 많이 발생하므로, 제정수 오차에 강인한 제어기의 시뮬레이션을 알아보자.
β는 다음과 같이 속도제어기의 대역폭의 5배로 설정했다.
이 때 주의해야 할 점은 β는 음수로 입력된다!
양수로 하려면 블록도의 부호를 바꿔줘야 한다.
관측기 설계는 그림 2를 참고하여 그림 3으로 나타냈다.
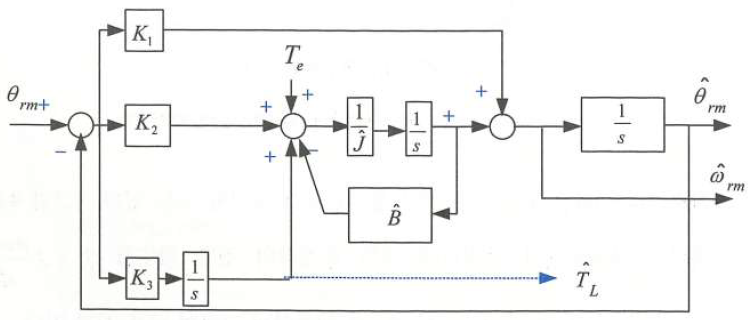

우리의 목적은 토크 외란만 볼 것이기 때문에 속도 입력은 필요없다.
결론을 살펴보자.
우측 왼쪽의 그래프를 보면, 토크 그래프가 나온다.
"TrqOrg"는 속도 제어기의 출력(토크), "DOBcomTrq"는 외란 관측기로부터 계산된 토크, "TrqFb"은 토크 방정식으로 계산된 토크를 의미한다.
즉, 빨간색 그래프는 노란색과 파란색 그래프의 합과 같으므로 외란 관측기가 제대로 설계된 것이다.
시뮬레이션에서는 마찰토크는 1[Nm]이며 외란 토크는 0.1초부터 스텝 응답으로 0.2[Nm]만큼 입력되었다.
그림 4의 좌측 아래 그래프를 보자.
0.1초부터 발생한 외란 토크를 보상하기 위해, 속도 제어기의 출력인 토크(노란색)에 외란관측기로부터 계산된 토크 보상(파란색)이 더해진 토크값이 부하 토크로 발생하게 된다.

이로써 관측기 설계가 끝이 났다.
설명이 미흡했지만, 실제 현업에 사용하기 위한 설계는 이정도로 충분하다고 본다.
추가로 외란에 대한 실험을 하고자 한다.
20[Hz] 성분의 하모닉 성분의 외란 토크가 입력된 경우를 살펴본다.
로봇에서 발생하는 주된 공진 주파수 성분이 20[Hz]이기도 해서 이와 같은 상황 가정이 맞는지 모르겠지만 한번 살펴보도록 한다.
시뮬레이션을 위해 20[Hz] 주파수 성분의 3배, 5배 주파수 성분을 같이 외란토크로 간주했다.
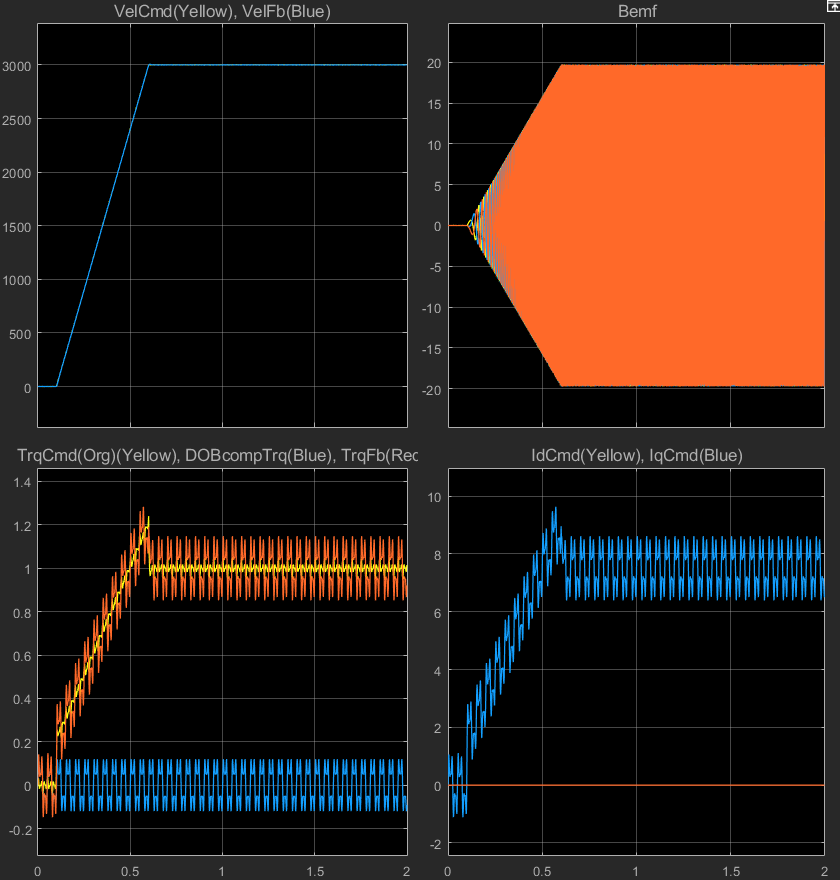
그림 5의 시뮬레이션 결과는 만족스럽게 속도 추종이 잘 되었다.
이 때, 연관지어볼 것이 속도 제어기의 절점 주파수이다.
이 경우는 속도 제어기의 절점 주파수로 100[Hz]를 사용했다.
그래프를 확대해보면 피드백 속도는 ±1[RPM]만큼 흔들리고 있지만 잘 추종하는 중이다.
(외란이 너무 강해서 일지도?)
그런데 속도 제어기의 절점 주파수가 50[Hz]가 된다면 어떨까?
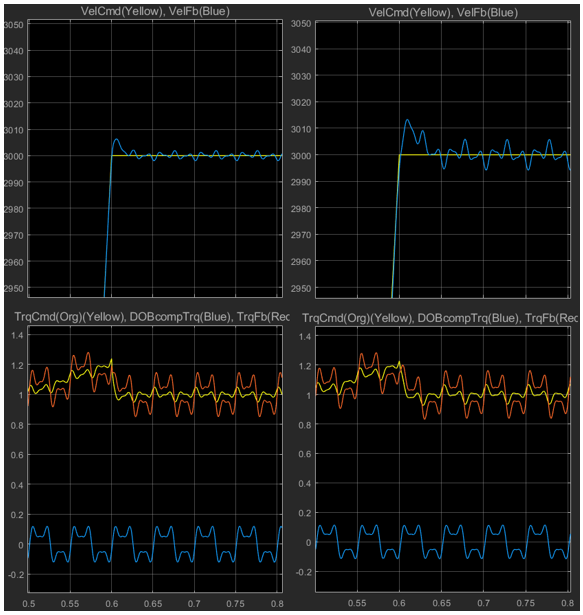
그림 6의 왼쪽은 속도제어기의 절점주파수가 100[Hz], 오른쪽은 50[Hz]인 경우의 시뮬레이션 결과이다.
절점주파수가 높은 쪽이 같은 외란일지라도 입력에 대한 응답성이 좋은 것을 볼 수 있다.
여기에서 설계자가 고심해야 할 사항이 생긴다.
속도제어기의 절점주파수를 높일수록 외란 주파수 성분에 대한 영향이 줄어든다.
하지만 속도제어기를 설계할 때 전류제어기의 대역폭과 충분한 차이가 있어야 한다고 설명했었다.
따라서, 전류제어기의 대역폭이 충분히 넓지 않다면, 속도제어기의 응답성을 위해 절점주파수를 높임과 동시에, 전류제어기와의 대역폭이 줄어들어 들게 된다.
속도제어기를 설계할 때, 전류제어시스템을 1차지연요소로 고려했던 것이 무너지게 된다.
이로 인해 많은 모터 드라이버 제조사에서 전류제어기의 대역폭을 가능한 한 크게 하려고 하는 것으로 생각한다.
위와 같은 상황에 대한 가정이 맞는지 틀리다면 내가 마지막에 기술한 내용이 틀릴 수도 있다.
728x90




